Egocentric capture, at planet scale.
A stereo head-mounted capture device with onboard storage and Wi-Fi, powered over USB-C from an external battery. Start a session and collect the data that trains the next generation of robotics foundation models.
Designed to disappear into the day.
Set the headset to Always recording and capture starts the moment it powers on — no phone, no tablet, no laptop in the loop. Strap it on at morning coffee and forget it until evening cleanup. The data you collect is what people actually do, not what they do for a camera.

Three streams. One clock.
Synchronized exposure between the two 1080p cameras. Synchronized clock between cameras and the 9-DoF IMU at 200 Hz. The streams arrive on disk already time-aligned — nothing to resample, interpolate, or stitch together before training.

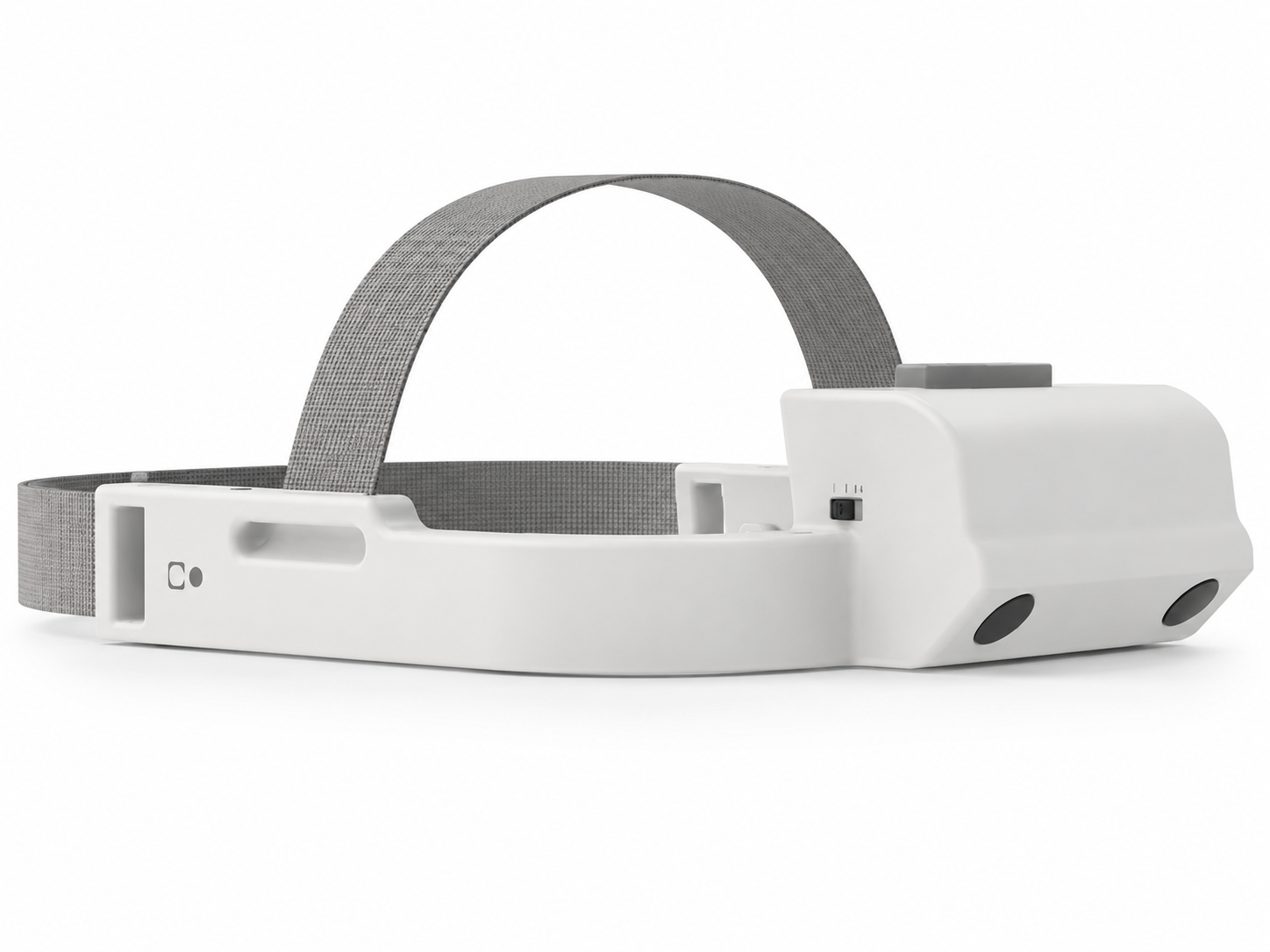
GoPro-compatible mount. Pitch matches your sight line.
An elastic fabric headband, a GoPro-style mount, and a pitch dial the wearer tunes themselves. Two cameras 63 mm apart — the average human inter-pupillary distance — so what the headset records is geometrically close to what you see.
- Cameras
- 2× 1080p at 30 fps, color
- Field of view
- 125° horizontal × 80° vertical, 148° diagonal (per camera)
- IPD (center-to-center)
- 63 mm — average human inter-pupillary distance
- IMU
- 9-DoF (accel + gyro + mag), 200 Hz
- Synchronization
- Hardware-synced exposure and clocks across cameras and IMU
- Encoding
- H.265 / HEVC (MP4 container), on-device
- Power
- USB-C powered from an external battery (user-supplied) — no internal battery; 6–9 hours of continuous recording with a 5,000 mAh pack*
- USB-C
- Power input only — no data over USB at this time
- Storage
- MicroSD card (user-supplied)
- Connectivity
- Wi-Fi — app pairing, live preview, and recording offload
- Form factor
- Headband with elastic fabric strap
- Mount
- GoPro-compatible — pitch is wearer-adjustable
* Recording runtime depends on the capacity of your external USB-C battery, plus working environment, ambient temperature, recording settings, and connectivity usage.
Bring planet-scale human dexterity to your robots.
We're partnering with labs and teams collecting at scale. If that's you, let's talk.